Rogowski coils
di Riccardo Fontanini
corso di Advanced Digital Control Systems for Electrical Energy Conversion del prof. Roberto Petrella
Ingegneria Elettronica Magistrale presso l'Università degli Studi Udine
anno accademico 2018/2019
Introduzione
Nei sistemi di conversione in cui vengono pilotati dei transistor, controllarne il corretto funzionamento risulta fondamentale per questioni di sicurezza, compatibilità elettromagnetica ed efficienza del sistema progettato.

Il sistema presentato in figura mostra lo schema di principio di un convertitore DC-AC (inverter). Tale schema non presenta nessun tipo di feedback atto a regolarne il funzionamento, viene detto a controllo “Open-Loop”, quindi in caso di guasto il circuito di pilotaggio dei transistori non potrà accorgersi del malfunzionamento, provocando anche danni irreparabile al sistema stesso. Pensiamo ad esempio ad un cortocircuito provocato dalla rottura del dielettrico di un avvolgimento di un motore.

Oltre ai guasti, il sistema di regolazione, dovrebbe intervenire anche sull’efficienza del sistema stesso potendo adattarne il comportamento in favore di uno sfruttamento ottimo delle risorse disponibili. Pensiamo semplicemente all’invecchiamento dei componenti, ai gradienti di temperatura che possono far variare nel tempo il comportamento di uno o più dispositivi oppure, in fase di controllo motore, correggere l’erogazione di corrente. Per fare tutto ciò, il sistema di controllo deve conoscere come reagisce il motore o i sistemi ad esso collegato in base agli stimoli che gli vengono forniti. Tale informazione viene riportata all’interno del controllore attraverso un meccanismo di feedback. Il sistema così creato viene definito “Closed-Loop”.

Nei sistemi moderni per realizzare questo feedback vengono usati dei trasduttori, che in questo particolare ambito applicativo misurano la corrente erogata dal convertitore verso il sistema che sta a valle (motore ecc..). I trasduttori più utilizzati sono rappresentati nella seguente tabella in base a diversi parametri:
|
Tipologia |
Costo |
Occupazione spaziale |
Logica di condizionamento |
Interazione con misura |
Isolamento galvanico |
|
Effetto Hall (closed loop) |
Elevato |
Media |
Alta |
Bassa |
Si |
|
Shunt |
Basso |
Bassa |
Bassa |
Elevata |
No |
|
Trasformatori di corrente |
Medio |
Alta |
Media |
Media |
Si |
|
Rogowski coils |
Basso |
Bassa |
Media |
Bassa |
Si |
In base all’applicazione che si vuole sviluppare è necessario che i trasduttori rispettino determinate specifiche, per cui non esiste un solo tipo di trasduttore “ottimale”. Il progettista deve tener presente vari aspetti, anche non prettamente tecnici, che possono influenzare la scelta di uno o dell’altro dispositivo.
Le bobine di Rogowski

Le bobine di Rogowski (Rogowski coils) sono state create nel 1912 per la misura di campi magnetici. Inizialmente non furono molto utilizzate per via del tenue segnale in uscita, tuttavia ai giorni nostri sono impiegate per la misura di correnti alternate. Con i sistemi moderni basati su microprocessore a basso costo è possibile amplificare e campionare il segnale per ottenere una lettura rappresentativa del campo magnetico che pervade la bobina senza utilizzare apparecchiature particolarmente ingombranti o costose.
Le bobine di Rogowski sono costituite da un solenoide avvolto attorno ad un materiale non ferromagnetico, in genere aria, in cui viene fatto passare il filo di ritorno dell’avvolgimento. La geometria può essere modificata in fase di progetto, come vedremo in seguito, in ogni caso l’assenza di un core ferromagnetico porta svariati benefici:
- non soffre di saturazione magnetica e/o di fenomeni isteretici;
- ha una buona linearità;
- è poco sensibile all’orientazione rispetto all’elemento di misura;
- possono essere molto piccole;
- sono poco costose;
- è garantito l’isolamento galvanico;
- il circuito di condizionamento è semplice e non richiede potenze elevate di alimentazione.
In particolare, le bobine di Rogowski, sono utilizzate per la misura di correnti alternate o transitori con un range da qualche Ampere fino a diverse centinaia. Esse sfruttano il campo magnetico prodotto da un filo che le attraversa longitudinalmente, similmente ai sensori ad effetto Hall, e come questi ultimi hanno la peculiarità di produrre un isolamento galvanico della misura.
Tali sonde però possiedono due aspetti da tenere presente in fase di progetto:
- non misurano le componenti DC della corrente;
- non sono molto accurate alle basse frequenze (<20Hz).
Individuazione delle sovracorrenti
Un compito fondamentale che il sistema di controllo deve svolgere è quello della protezione dell’intero sistema. Una problematica ricorrente nei sistemi di conversione di potenza è la protezione da sovracorrenti, cioè proteggere il sistema in caso di guasto misurando la corrente/tensione erogata al sistema controllato. Per fare ciò è possibile utilizzare un trasduttore, come precedentemente affermato, oppure in qualche caso specifico è possibile risparmiare spazio e denaro utilizzando il sistema di conversione stesso come trasduttore: nei convertitori di potenza presenti sul mercato che sfruttano transistor IGBT con tecnologia al Si (è un BJT pilotato un MOSFET controllato in tensione) è possibile sfruttare una così detta “tecnica di desaturazione” per registrane il corretto funzionamento.

Nell’ultimo periodo sono stati introdotti al posto degli IGBT, però, dei MOSFET SiC. Tali dispositivi hanno prestazioni migliori in fatto di velocità di commutazione, corrente erogata, breakdown e temperature di funzionamento. L’utilizzo di questi nuovi dispositivi a semiconduttore ha permesso lo sviluppo di convertitori più performanti e contestualmente è stato necessario aggiornare le tecniche e i circuiti di supporto adottati per la tecnologia IGBT siccome per i SiC non si adattano altrettanto bene, come vedremo.
Tecnica di desaturazione
Durante il normale funzionamento del transistore in conduzione, esso si trova in regione di saturazione, quindi la tensione Vce rimane bassa (dell’ordine di 1-3 V). Quando invece avviene un cortocircuito, la corrente aumenta, facendo entrare in zona lineare il transistore. Dalla caratteristica di uscita (linea blu) si evince quindi che la tensione Vce cresce in modo repentino, portandosi a circa 8 – 10 V. Misurando tale tensione è quindi possibile imporre una soglia massima di corrente/tensione entro la quale spegnere il transistore. Tale tecnica permette di utilizzare convertitori A/D sufficientemente veloci da poter intervenire sul cortocircuito, ma con una risoluzione anche bassa (8 - 10 bit). Come si vede dalla caratteristica di uscita, gli IGBT si prestano all’impiego di tale tecnica grazie alla forte discrepanza tra le due regioni di funzionamento coadiuvata alla sufficientemente stabilità in temperatura.
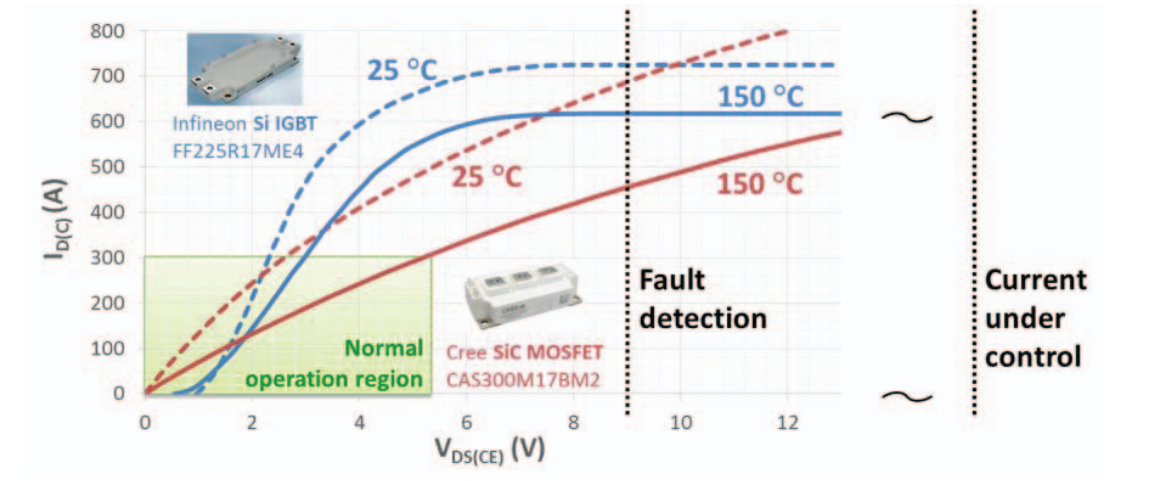
Al contrario degli IGBT, i dispositivi SiC hanno una caratteristica di uscita più “morbida”, che enfatizza la dipendenza dalla temperatura. Per cui per utilizzare tale tecnica anche con i dispositivi SiC sarebbe necessario un controllo misto temperatura-tensione-corrente che farebbe lievitare (inutilmente) i costi del circuito.
Il sistema proposto nell’articolo utilizza per l’individuazione della corrente di corto circuito una bobina di Rogowski in cascata ad un integratore e successivamente ad un comparatore. Se la corrente (tensione integrata) supera una certa soglia (generata dinamicamente attraverso un DAC dall’FPGA), allora viene attivato il segnale derivante dal comparatore per comunicare al GD del problema di overcurrent.

Dall’immagine successiva possiamo notare come il sistema finale (vedremo in seguito come è stato progettato) risponda in tempi molto rapidi e permetta di condizionare l’uscita tempestivamente.

Misura della corrente di fase
Nell’articolo viene proposto un circuito per l’acquisizione, il condizionamento e la successiva rielaborazione del segnale proveniente dalle bobine di Rogowski, utile sia per la misura della corrente di fase, che per l’individuazione della corrente di cortocircuito. Di fatto i due problemi sono collegati, come è riscontrabile dall’articolo, richiedendo per buona parte la stessa circuiteria.
La figura sottostante mostra lo schema di principio su cui basare le considerazioni che faremo in seguito: rappresenta lo schema di principio di un convertitore con un Gate Driver (GD) che pilota i due transistor mediante tecnica PWM, ad ogni ramo è collegato un Rogowski Switch Current Sensor (RSCS) il cui scopo è misurare la corrente di ramo quando il rispettivo switch è in conduzione.

Il diagramma temporale mostra le forma d’onda tipiche:
- da $t_0$ a $t_1$, S2 è in conduzione mentre S1 è spento, RSCS di S2 misura la corrente iS2 mentre RSCS di S1 misura una corrente nulla;
- da $t_1$ a $t_2$, avviene il comportamento inverso, cioè S1 è in conduzione, mentre S2 è spento, similmente al punto precedente RSCS di S1 misura la corrente $i_{S1}$, mentre RSCS di S2 misura 0.
Attenzione però! I sensori RSCS forniscono in uscita una tensione che è legata alla corrente misurata secondo la legge:
$$ \begin{equation} V_{coil} = M {di_D \over dt} \end{equation} $$
Con $i_D$, misura di corrente, $V_{coil}$ tensione ai capi, $M$ coefficiente di mutua induzione.
Quindi per ottenere una misura in corrente è necessario integrare nel tempo $V_{coil}$ a meno di una costante:
$$ \begin{equation} V_{int} = {1\over RC} \int V_{coil}\, dt + C_{int} = {M \over RC } i_D + C_{int} \end{equation}$$
Per fare ciò viene proposto uno stadio integratore con in cascata un filtro R-C a 30 MHz, con relativo buffer (necessario per condizionare il segnale e non rimuovere le alte frequenze per riscontrare una sovracorrente con $V_{SC}$). Successivamente troviamo un ulteriore filtro accordato a 3.3 MHz per eliminare le alte frequenze di risonanza dovute allo switching ed infine un amplificatore (adattatore di segnale).

Poiché uno stadio integratore ideale non esiste, se periodicamente ($T_{PWM}$) non viene resettato il valore integrale, l’errore di integrazione tende a crescere con il tempo. Per far in modo che questo non accada è stato inserito uno switch (MOSFET) che scarica il condensatore dell’integratore e resetta il valore.
Una volta campionato il valore in uscita dal level shifter, sono disponibili digitalmente all’FPGA entrambi i campioni di corrente $i_{S1}$ e $i_{s2}$. Per ricavare la corrente di ramo quindi è possibile sottrarre tali campioni (ed eventualmente scalarli) digitalmente all’interno dell’FPGA.
$$i_L = i_{S1} - i_{s2}.$$
Notiamo che all’uscita del buffer viene segnalata $V_{SC}$: tale tensione può essere utilizzata per eseguire l’analisi dei cortocircuiti. Come abbiamo visto la banda del segnale $V_{SC}$ è determinata dal filtro R-C in ingresso, in questo caso è di 30MHz.
Successivamente il riferimento in tensione della fase della corrente ($V_{phase}$) viene ottenuto attraverso un DAC che converte il dato digitale proveniente dall’FPGA in un riferimento analogico opportunamente filtrato ed amplificato.
Perché farlo digitalmente e non direttamente in modo analogico?
La seguente tabella mostra la comparazione tra una analisi (fatta nell’articolo) che compara una acquisizione analogica e una digitale.

Come si vede, a discapito di un incremento del ritardo (che rimane comunque modesto) ed una maggiore presenza circuitale, è possibile inserire all’interno della parte digitale algoritmi di controllo per la calibrazione, reset o gestione degli stati di errore, inoltre tutto il circuito risulta più flessibile a modifiche future o addirittura gestione da remoto.
L’immagine sottostante mostra la scheda sviluppata per il sensing della corrente.

Analisi dei tempi di acquisizione
Per il test è stato deciso di sfruttare una modulazione PWM a 30 KHz di una sinusoide a 400 Hz, tempi morti di 300 ns.

Per questo documento sono stati scelti i seguenti componenti al fine di realizzare la board:
- 14 bit, 2.5MSps, su SPI a 60MHz ADC (equivalente datasheet ADS7056)
- 16 bit, 2.5Msps, su SPI a 60MHz DAC (equivalente datasheet)
- FPGA con clock a 100 MHz
Di seguito viene mostrato il diagramma temporale dell’ADC (SAR con interfaccia SPI 60 MHz):

Si è ottenuto un tempo di ritardo corrente di fase – riferimento in tensione di:

Come si vede l’FPGA ha il grande vantaggio di non dover gestire interrupt o essere condizionata da ritardi tipici dei convenzionali microcontrollori, difatti la sottrazione delle correnti avviene in un ciclo di clock, una volta che il dato è stato digitalizzato. Si vuole inoltre focalizzare l’attenzione sul fatto che la conversione del dato digitale in tensione analogica aumenta sensibilmente il tempo di delay. Se tale dato fosse inviato digitalmente, magari attraverso sempre il protocollo SPI, il tempo di propagazione della misura potrebbe essere ulteriormente ridotto. Inoltre, l’imprecisione dovuta alla conversone DA (come l’errore di quantizzazione o incertezza dei componenti) verrebbe meno, aumentando così anche la precisione della misura stessa.

Nell’immagine precedente si può notare il confronto tra la corrente ricostruita grazie alle bobine di Rogowski (traccia blu) e un sensore di corrente ad effetto Hall commerciale (traccia rosa). Dall’analisi si nota che l’errore (traccia azzurra) dipende da due fattori:
- Ritardo dell’apparato di misura, quantificato precedentemente in 1.6 us, tale ritardo è correggibile adattando il PWM a livello di gate driver;
- Accuratezza del sensore, non correggibile via software, in ogni caso contenuto.

Secondo l’articolo (Articolo 13) l’errore relativo va dal 8% per correnti basse, fino ad un minimo di 0.5% per le alte correnti.

L’analisi in frequenza delle tracce precedentemente considerate mostra una buona attenuazione delle armoniche in banda attenuata, lasciando filtrare prevalentemente la fondamentale a 400 Hz. Si ricorda che il sistema di filtraggio prevede l’attenuazione della frequenza PWM (in questo caso 30 kHz) e di tutte le sue armoniche. Da questo punto di vista il sensore che sfrutta le bobine Rogowski è assolutamente equiparabile al sensore di Hall commerciale.
Problema del clamping

Un problema importante del sistema proposto è il Clamping: cioè un mancato reset dell’integratore della sonda di Rogowski causato dalla stazionarietà del segnale PWM. Se lo switch che cortocircuita la capacità dell’integratore fosse comandato direttamente dal segnale PWM, allora potrebbe succedere che per periodi superiori a 100 $\mu s$ si verifichino grossi problemi di ricostruzione della corrente. In tali casi non è possibile fare affidamento sul valore della corrente ricostruita, quindi realizzare il controllo closed loop del sistema.

Il Clamping si verifica in genere con la modulazione Discontinuous PWM (in cui è necessario applicare la configurazione 000 o 111), che permettono di migliorare le prestazioni del sistema riducendo le perdite per commutazione.
Ulteriori informazioni potrete trovarle qui, e qui.
Una possibile soluzione consiste nello sfruttare il bilanciamento del carico sull’inverter. Dall’elettrotecnica è risaputo che in un sistema trifase con carico bilanciato, come quello presentato, la somma delle correnti nel punto neutro è nulla:
$$ \begin{equation} i_a + i_b + i_c = 0 \end{equation}$$
Ciò naturalmente permette di calcolare una corrente in funzione delle altre due. Nel caso del clamping (in cui una corrente di fase è soggetta a errore) è quindi possibile calcolarla digitalmente in base alle correnti degli altri rami. Questo è possibile perché, nel DPWM, mentre un ramo è in stato di dumping, gli altri devono commutare. Questo fa si che l’errore sui rami in commutazione sia trascurabile e quindi l’approssimazione della corrente di fase in dumping sia buona.
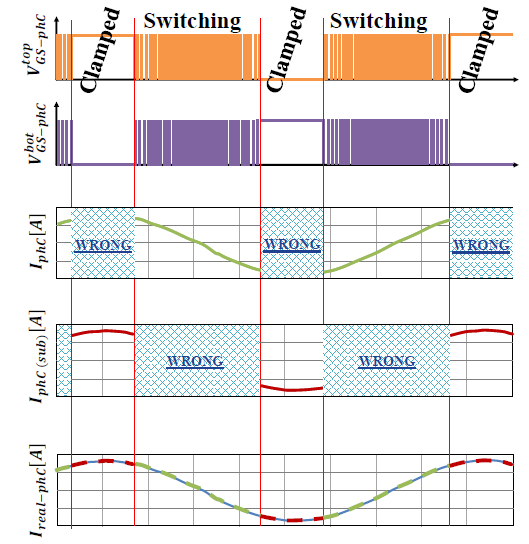
Nell’immagine precedente possiamo vedere un esempio di ricostruzione della corrente di fase (traccia blu) grazie alla corrente di fase campionata (traccia verde) (differenza tra i valori campionati delle due bobine di Rogowski per ogni fase) e alla corrente ottenuta dalla somma negativa delle altre due fasi (traccia rossa).

Ma quando sovrapporre la traccia ricostruita o quella calcolata?
Di base l’algoritmo che prende la decisione di sostituire una caratteristica rispetto all’altra risiede del controllore (normalmente programmato in C). Tale algoritmo è intrinsecamente sequenziale quindi può essere rappresentato adeguatamente da un flow chart:
Dove $dc_A$, $dc_B$, $dc_C$ (duty cycle reference) sono dei registri in cui è scritto lo stato della modulazione di ogni fase. Se corrispondono al valore nullo oppure al massimo vuol dire che la fase è il clamping.
L’implementazione dell’algoritmo di ricostruzione della corrente sul controllore è piuttosto semplice. Ipotizzando di lavorare con uno schema di modulazione DPWM a 60°, ad ogni acquisizione del riferimento di fase proveniente dal DAC connesso alla FPGA è necessario:
- convertire i valori del riferimento di fase;
- controllare il riferimento di modulazione per ogni fase
- se la fase risulta in clamping allora bisogna sostituire la somma negativa delle altre due correnti;
- se la fase è in switching mode allora il riferimento di corrente è corretto;
- aggiornare il valore di riferimento (necessario per la sincronizzazione).
I risultati dell’algoritmo di correzione sono buoni: come si vede il riferimento di corrente segue la caratteristica sinusoidale desiderata (l’immagine successiva è una raffigurazione dei valori all’interno dei registri $Ia$, $Ib$, $Ic$).

Un ulteriore confronto può essere fatto tra la figura precedente e la figura. Come si vede il fenomeno di distorsione provocato dal clamping è stato corretto efficacemente.
Alterazione della misura
L’introduzione delle bobine di Rogowski ha, tra le altre motivazioni, la funzione di ridurre gli ingombri e migliorare le prestazioni del sistema. Volendo però ridurre lo spazio occupato dagli elementi di sensing (ed integrare il sistema in modo da ottenere un circuito di controllo compatto) è naturale pensare che questi ultimi possano essere disturbati dai campi magnetici prodotti dalle fasi adiacenti.

Per mitigare il concatenamento dei campi magnetici non voluti sono state adottati vari accorgimenti:
- incremento del numero di spire dell’induttore;
- il conduttore di ritorno è stato fatto passare all’interno del solenoide, così da minimizzare la spira equivalente ai campi magnetici esterni.
Nell’ articolo è possibile trovare le misure di disturbo riferite all’applicazione descritta. In base ai risultati ottenuti è possibile affermare che grazie agli accorgimenti precedentemente attuati, il livello di rumore iniettato è molto piccolo, quasi inesistente.
Metodologie costruttive
Ci sono molte topologie e tecniche per costruire sonde che si basano sulle bobine di Rogowski. Le tipologie più tipiche sono tre:
- Toroidali, formate da un unico avvolgimento in aria;
- Planar Rogowski Coils, basate sulla tecnologia planare, la struttura è simile alle torroidali, ma l’avvolgimento è formato da piste impresse direttamente su PCB, il collegamento tra i vari layer è garantito attraverso i via;
- Combined Rogowski Coils, è una tecnologia planare da sfruttare in un dominio 3D, utilizza una scheda principale su cui sono collegati dei PCB secondari in una struttura a raggera, il flusso viene concatenato da questi ultimi, mentre il terminale di uscita è sulla scheda principale.



Oltremodo possono variare anche le geometrie del solenoide, in particolare possono essere a profilo tondo, rettangolare oppure ovale:



In base alle caratteristiche costruttive, le varie bobine modificano la mutua induttanza, maggiori informazioni possono essere trovate qui, qui e qui.
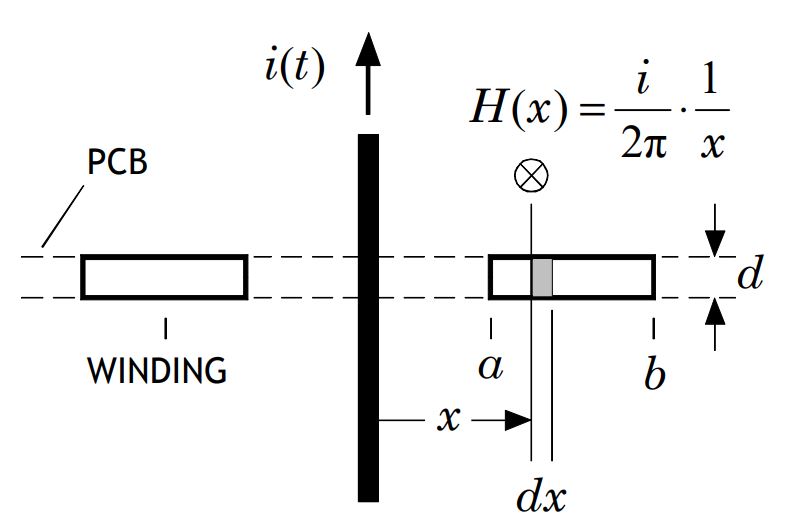
È possibile calcolare il valore della mutua induttanza applicando la legge di Ampere:
$$ \begin{equation} \phi(t) = \int B\, dA = \mu_0 d \int_a^b H(x)\,dx = \mu_0 {d\over{2\pi} } i(t) \int_a^b {1 \over x }\,dx = \mu_0 {d\over{2\pi} } i(t) ln\left( {a \over b }\right) \end{equation}$$
Da cui:
$$\begin{equation} V_{coil} = N {{d\phi(t)}\over{dt}} = \mu_0 N {d\over{2\pi} } ln\left( {a \over b }\right) {{di(t)}\over{dt}} = M {{di(t)}\over{dt}} \end{equation}$$
Dove, nella sua forma più semplice, la sua mutua induttanza vale:
$$\begin{equation} M = {\mu_0 N d \over {2\pi} } ln\left({a \over b}\right) \end{equation}$$
Dove $\mu_0$ è la permeabilità nel vuoto, $N$ è il numero di spire, $d$ è la larghezza del toroide, $b$ è il diametro esterno, mentre $a$ è il diametro interno.
Le bobine di Rogowski possono avere un unico strato di avvolgimenti oppure più di uno. Maggiore è il numero di strati, maggiore è il valore della mutua induttanza.
Riferimenti e bibliografia
- PHASE CURRENT RECONSTRUCTION BASED ON ROGOWSKI COILS INTEGRATED ON GATE DRIVER OF SIC MOSFET HALF-BRIDGE MODULE FOR CONTINUOUS AND DISCONTINUOUS PWM INVERTER APPLICATIONS, Slavko Mocevic, Jun Wang, Rolando Burgos, Dushan Boroyevich, Marko Jaksic, Mehrdad Teimor, IEEE;
- A SURVEY OF WIDE BANDGAP POWER SEMICONDUCTOR DEVICES, Jose Millan, Philippe Godignon, Xavier Perpina, Amador Perez-Tomas, and Jose Rebollo, IEEE transactions on power electronics, vol. 29, no. 5, Maggio 2014;
- INTEGRATED SWITCH CURRENT SENSOR FOR SHORTCIRCUIT PROTECTION AND CURRENT CONTROL OF 1.7-KV SIC MOSFET MODULES, Jun Wang, Zhiyu Shen, Rolando Burgos, Dushan Boroyevich, 978-1-5090-0737-0/16 2016 IEEE;
- DESIGN OF A HIGHBANDWIDTH ROGOWSKI CURRENT SENSOR FOR GATE-DRIVE SHORTCIRCUIT PROTECTION OF 1.7 KV SIC MOSFET POWER MODULES, J. Wang, Z. Shen, R. Burgos, and D. Boroyevich, IEEE 3rd Workshop on Wide Bandgap Power Devices and Applications (WiPDA), Novembre 2015;
- PHASE CURRENT SENSOR AND SHORT-CIRCUIT DETECTION BASED ON ROGOWSKI COILS INTEGRATED ON GATE DRIVER FOR 1.2 KV SIC MOSFET HALF-BRIDGE MODULE, Slavko Mocevic, Jun Wang, Rolando Burgos, Dushan Boroyevich, Marko Jaksic, Mehrdad Teimor, Brian Peaslee, IEEE 978-1-4799-7312-5/18 2018;
- LOW-COST CURRENT SENSOR FOR POWERCAPACITORS BASED ON PCB ROGOWSKI COIL, H. Votzi, M. Vogelsberger, H. Ertl, PCIM Europe 2011, Maggio 2017;
- COMPARISON OF MODULATION TECHNIQUES OF A GRID SIDE CONVERTER IN AWIND ENERGY CONVERSION SYSTEM, Mustafa Cem Ozkilic, Hulya Obdan, Hadi Sarul, AUTOMATIKA 57 2, 2016
- COMPARATIVE ANALYSIS OF DISCONTINUOUS SPACE VECTOR PWM TECHNIQUES OF A THREE-PHASE INVERTER, Mohammad Arif Khan Puneet Sharma Atif Iqbal M. Rizwan Khan;
- IGBT OVERCURRENT AND SHORT-CIRCUIT PROTECTION IN INDUSTRIAL MOTOR DRIVES, Dara O’Sullivan, Documento tecnico – Analog Devices;
- PLANAR ELECTROMAGNETIC CURRENT SENSOR FOR DISTRIBUTION TRANSFORMER APPLICATION, Gaurang Chauhan, Ram Krishna Mishra, Santosh Phulare, IEEE;
- DESIGN AND CHARACTERISTICS OF TWO ROGOWSKI COILS BASED ON PRINTED CIRCUIT BOARD, Chen Qing, Li Hong-bin, Zhang Ming-ming, and Liu Yan-bin, IEEE transactions on instrumentation and measurement, vol. 55, no. 3, Giugno 2006;
- ADS7056 ULTRA-LOW POWER, ULTRA-SMALL SIZE, 14-BIT, HIGH-SPEED SAR ADC DATASHEET, Texas Instruments, Marzo 2017;
- EFFECTS OF GEOMETRICAL PARMETERS ON THE PERFORMANCE OF ROGOWSKI COIL FOR CURRENT MEASURING, Pang Fubin, Gao Lei, Yuan Yuba, Bu Qiangsheng, Ji Jianfei, IEEE PES Asia-Pacific Power and Energy Conference 2016;
- ADVANTAGES OF USING FPGAS IN PRECISION INVERTER MODULES, Benjamin Schuele, Johannes Eha, White Paper – Aradex, 2013.